

producta






ZW568 Robot Auxilii Ambulandi
Introductio Producti
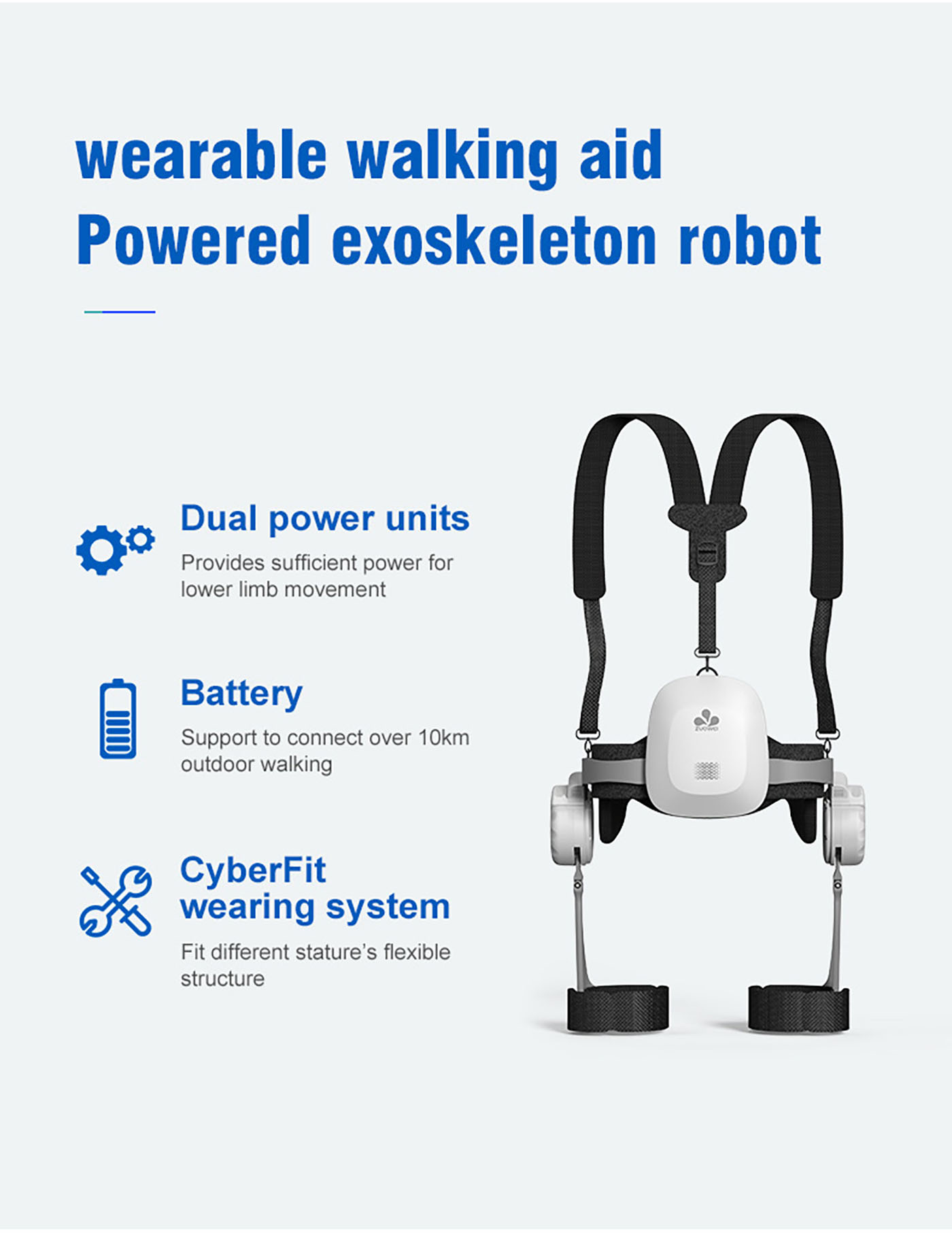
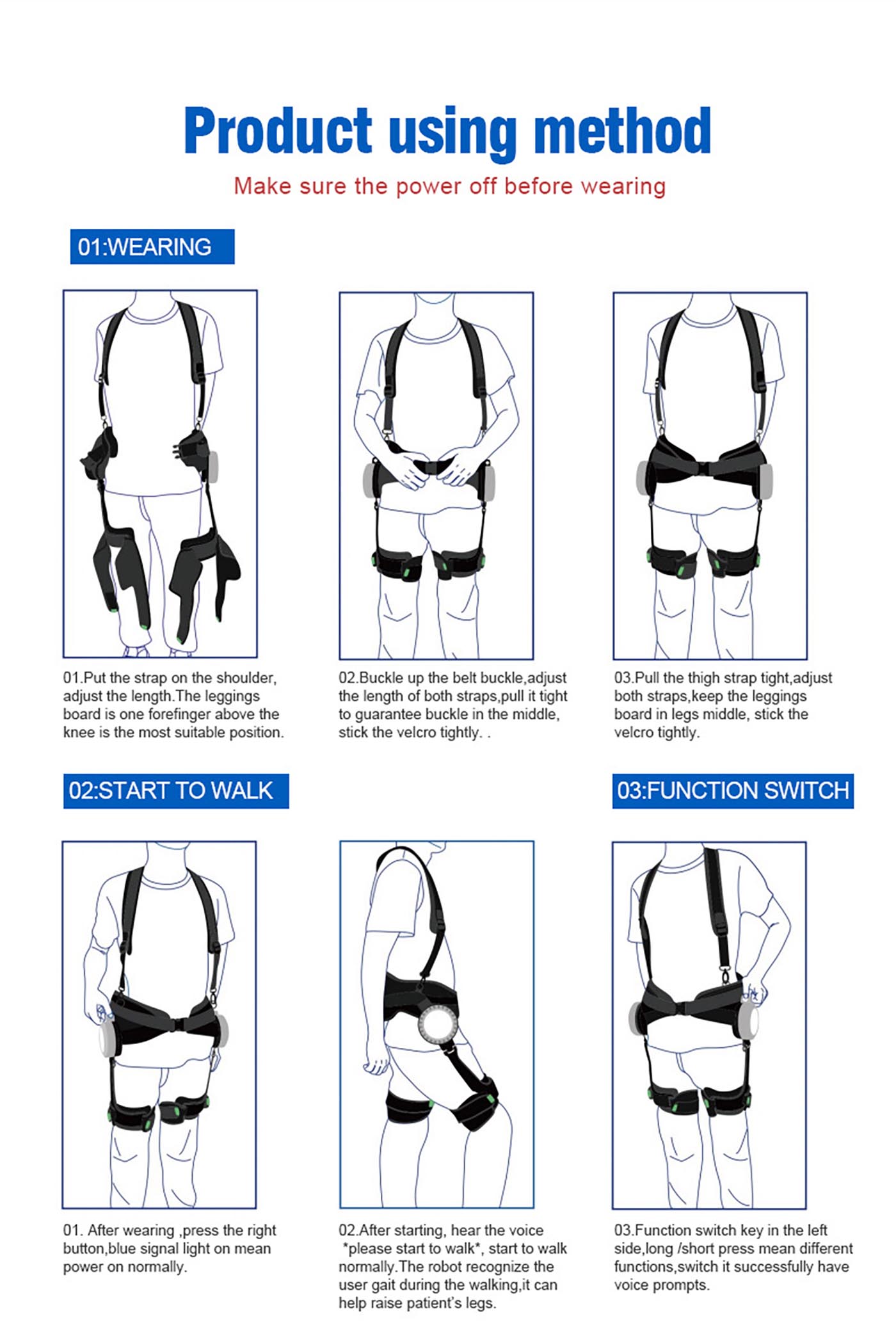
Automatum adiutorium ambulandi intelligente ZW568 est automatum gestabile summae qualitatis. Duae unitates potentiae in articulatione coxae positae vim adiuvandam ad extensionem et flexionem femoris praebent. Hic automatus usoribus facilius ambulare, energiam conservare et qualitatem vitae eorum emendare adiuvabit. Parvam sed potentem unitatem potentiae bilateralem habet quae satis vim ad motum membri inferioris per tres horas usus continui ad summum praebet. Usoribus longiora spatia facilius ambulare adiuvare potest, et iis qui impedimenta ambulandi habent adiuvare potest ut facultatem ambulandi recuperent, immo etiam ut per scalas cum minore viribus physicis ascendant et descendant.


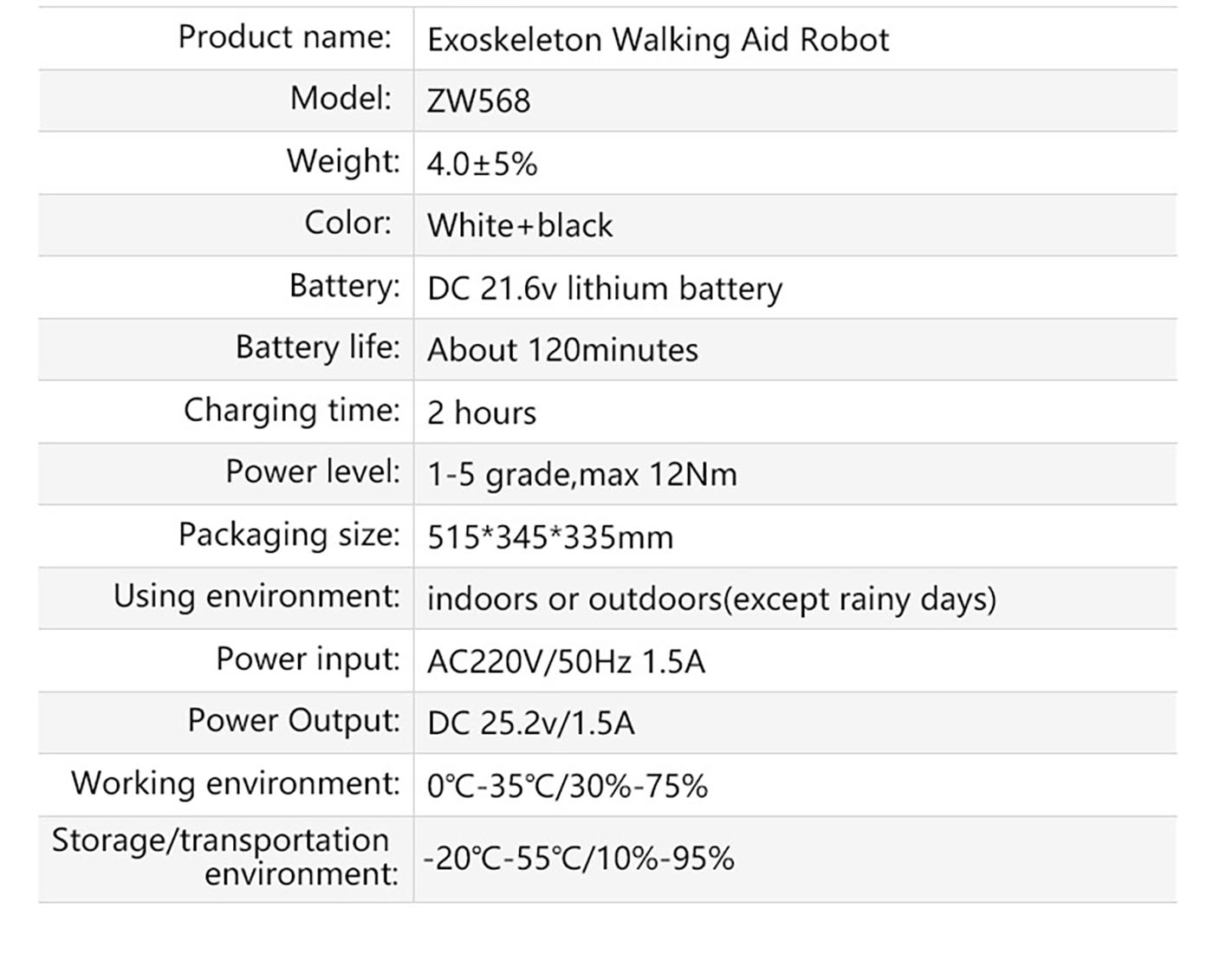
Parametri
| Tensio Relata | 220 V 50Hz |
| Batteria | DC 21.6 V |
| Tempus tolerantiae | Centum viginti minuta |
| Tempus impletionis | quattuor horae |
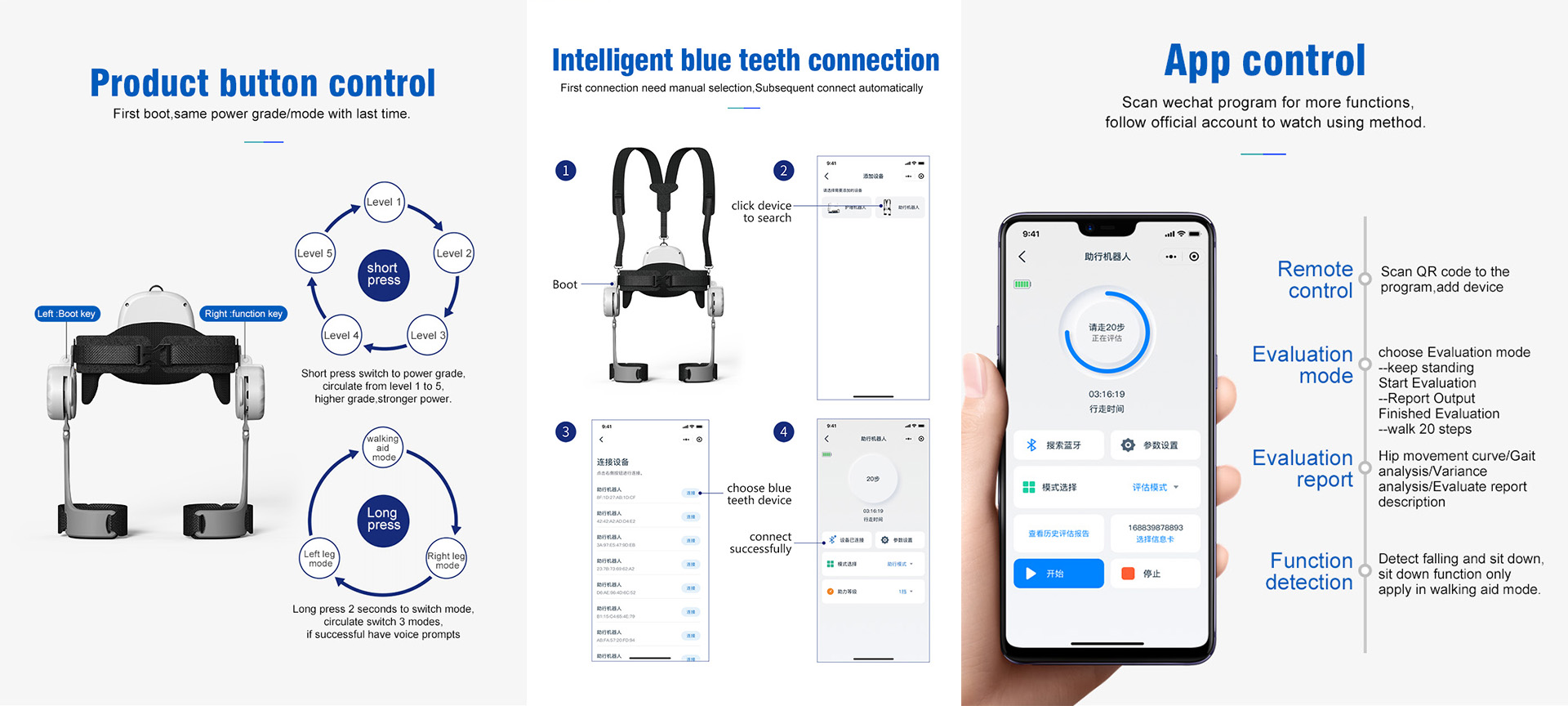
| Gradus potentiae | Gradus 1-5 |
| Dimensio | 515 × 345 × 335 mm |
| Ambientes laboris | intra vel extra aedes, excepto die pluvioso |
Epulae

●Usoribus auxilium fer in cotidiana exercitatione rehabilitationis per exercitationes incessus ad functionem corporis emendandam.
● Eis qui soli stare possunt et facultatem ambulandi celeritatemque ad usum cotidianum augere volunt.
● Eis qui coxae articulationem viribus carent, auxilium ferre ut ambulent et valetudinem vitaeque qualitatem augere.
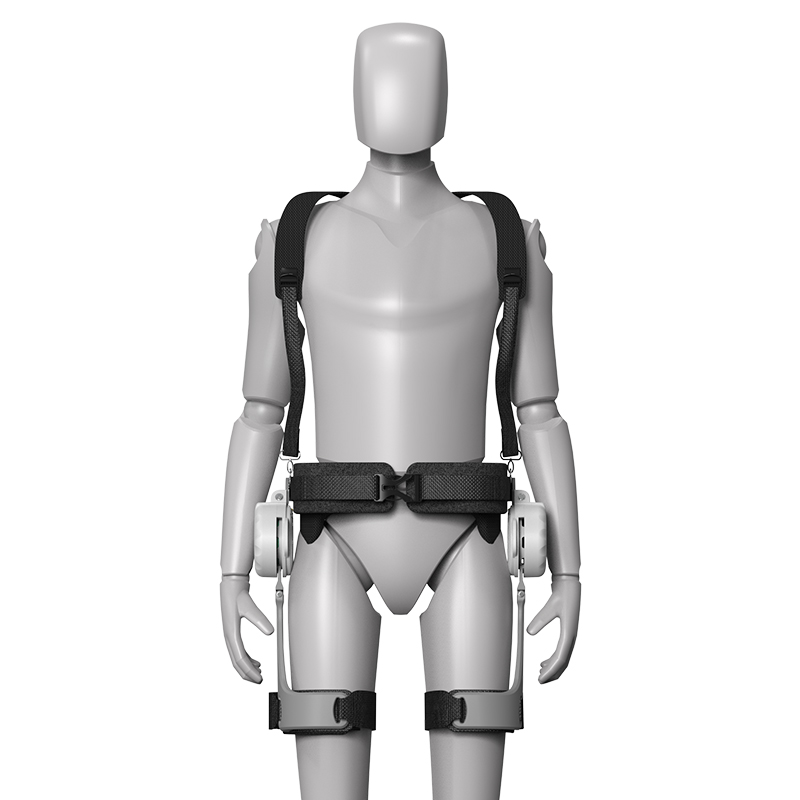
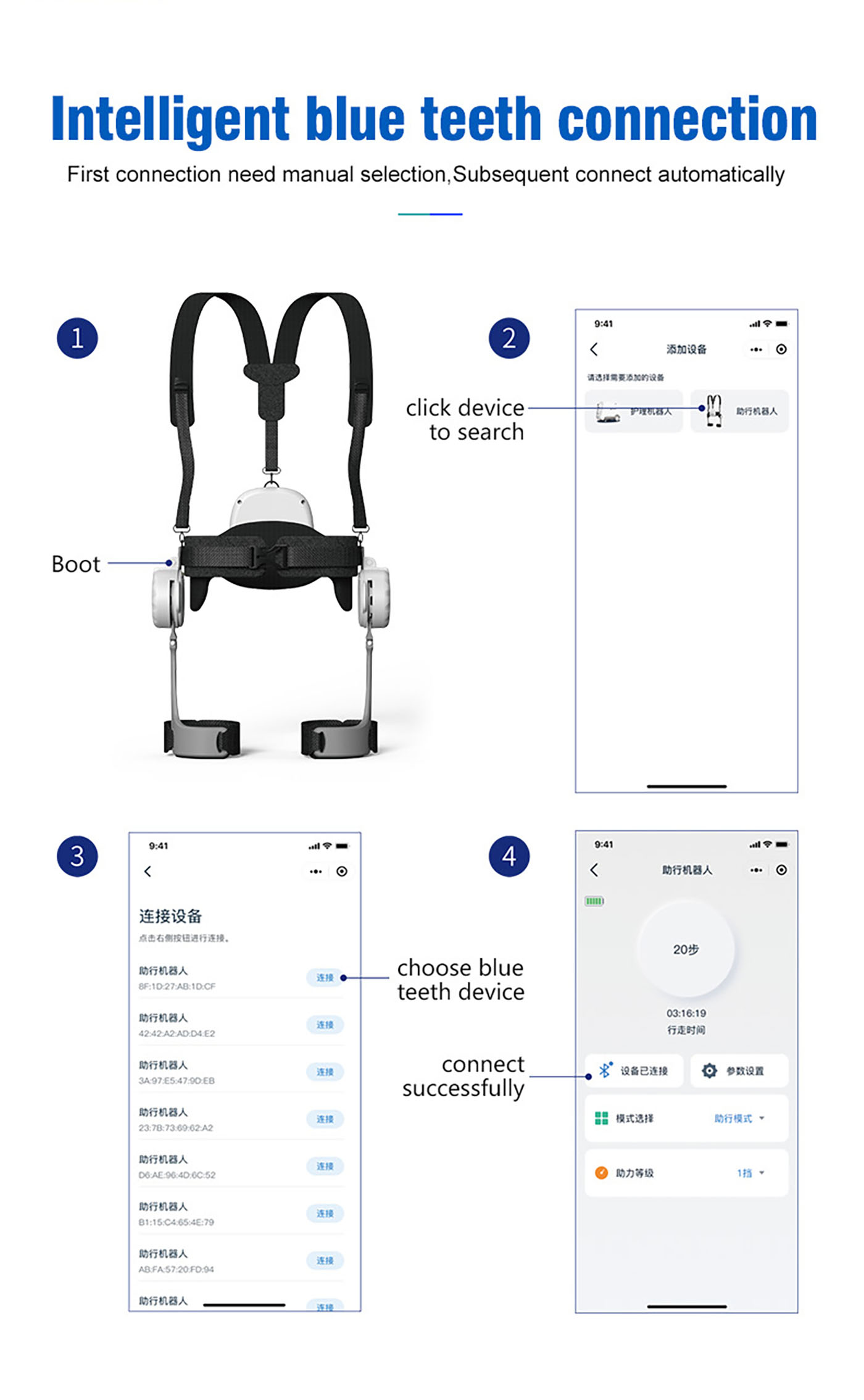
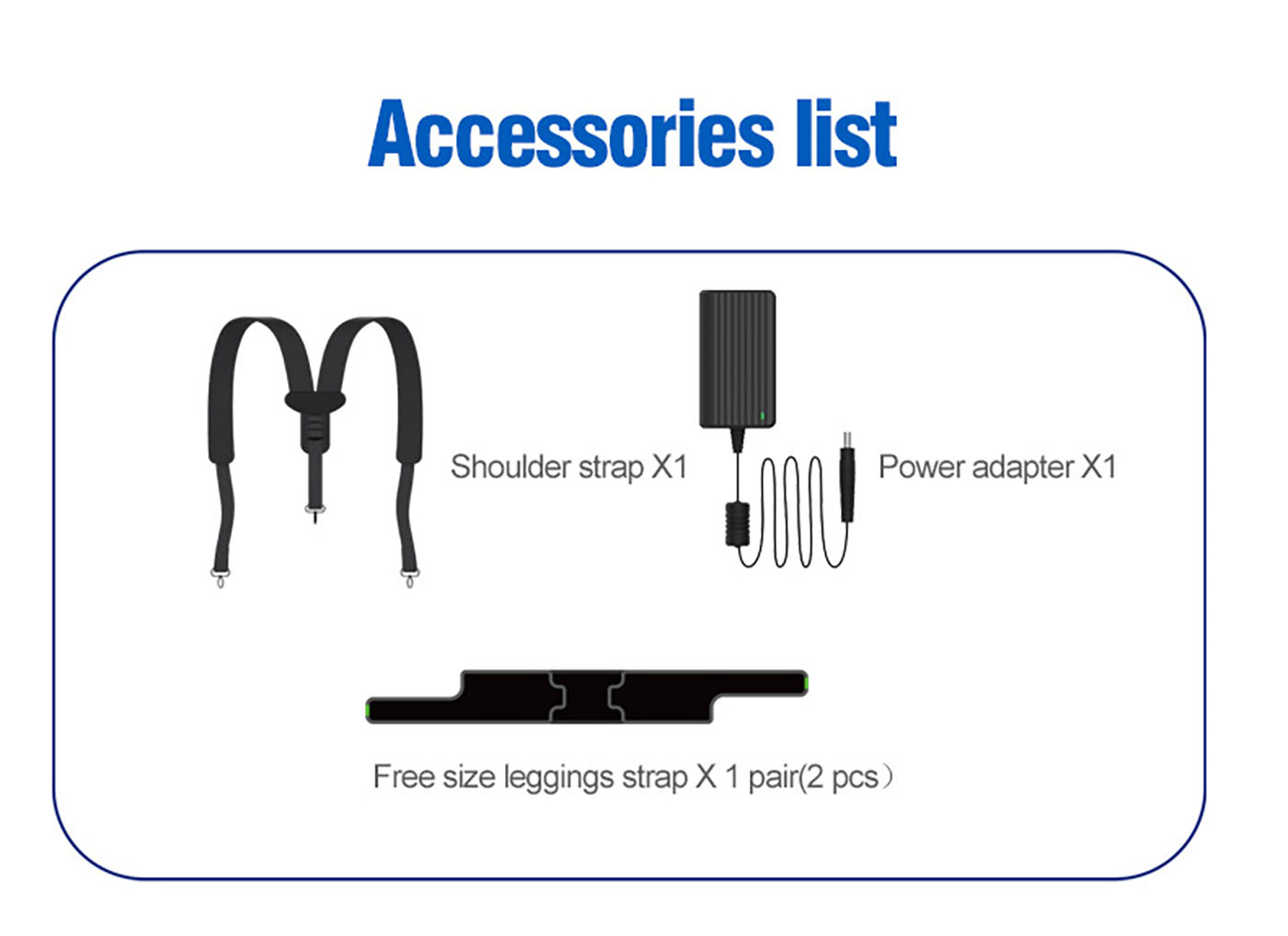
Structurae
Productum constat ex bulla potentiae, unitate potentiae cruris dextri, fibula zonae, clave functionis, unitate potentiae cruris sinistri, corrigia humeralis, sacco dorsuali, protenso lumborum, tabula tibialium, corrigia femorum.

Detalia


Applicatio
Adhibetur ad:
Homines cum defectu roboris coxarum, homines cum debilitate roboris crurum, aegroti morbo Parkinsoniano, rehabilitatio post operationem.



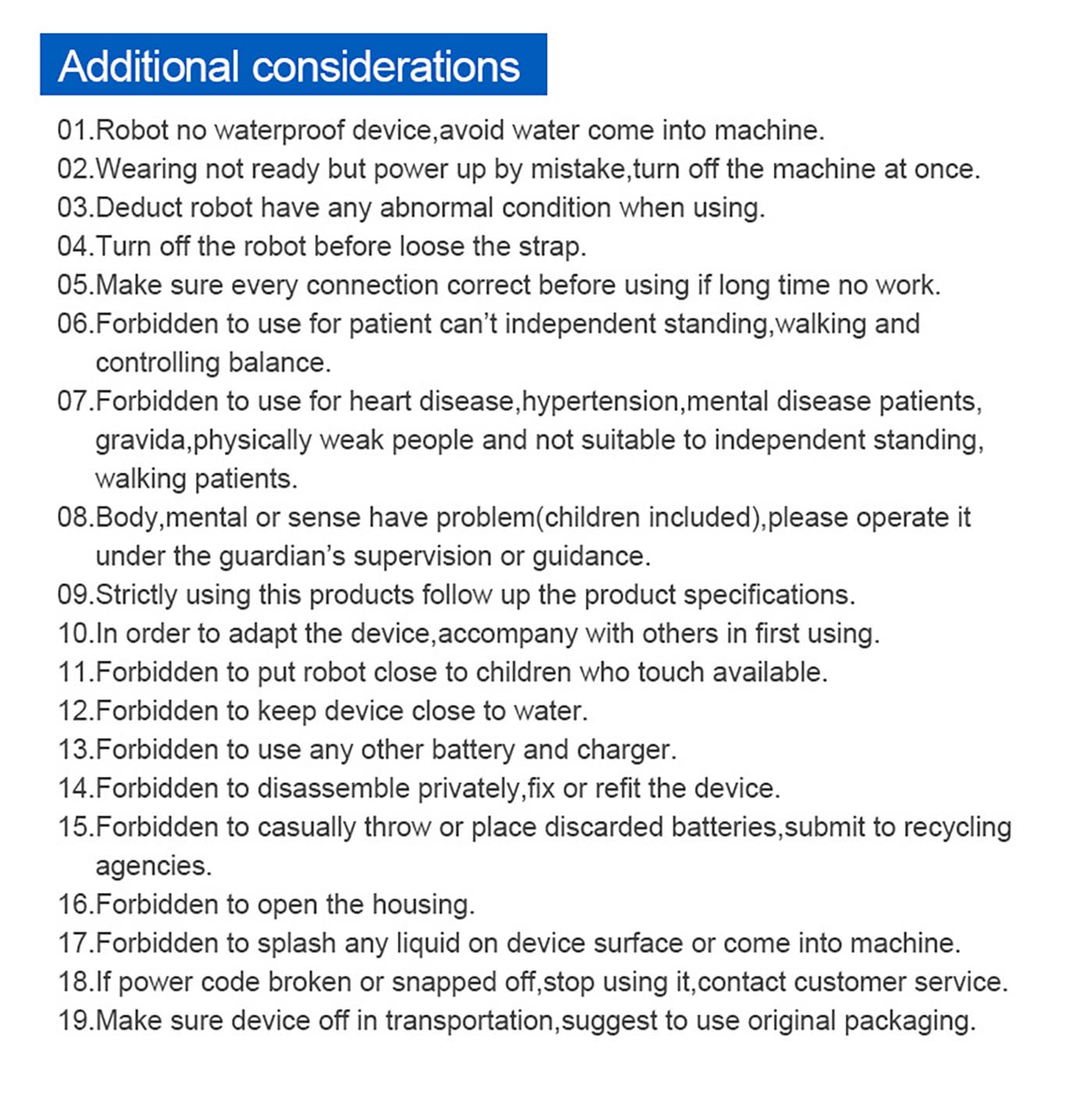
Considerationes additionales
Attentio:
1. Automatum non est aquae impervium. Ne ullum liquorem in superficiem instrumenti vel in instrumentum effundas.
2. Si instrumentum per errorem accenditur sine apparatu, statim exstingue.
3. Si qua errata accidant, quaeso statim errorem investiga.
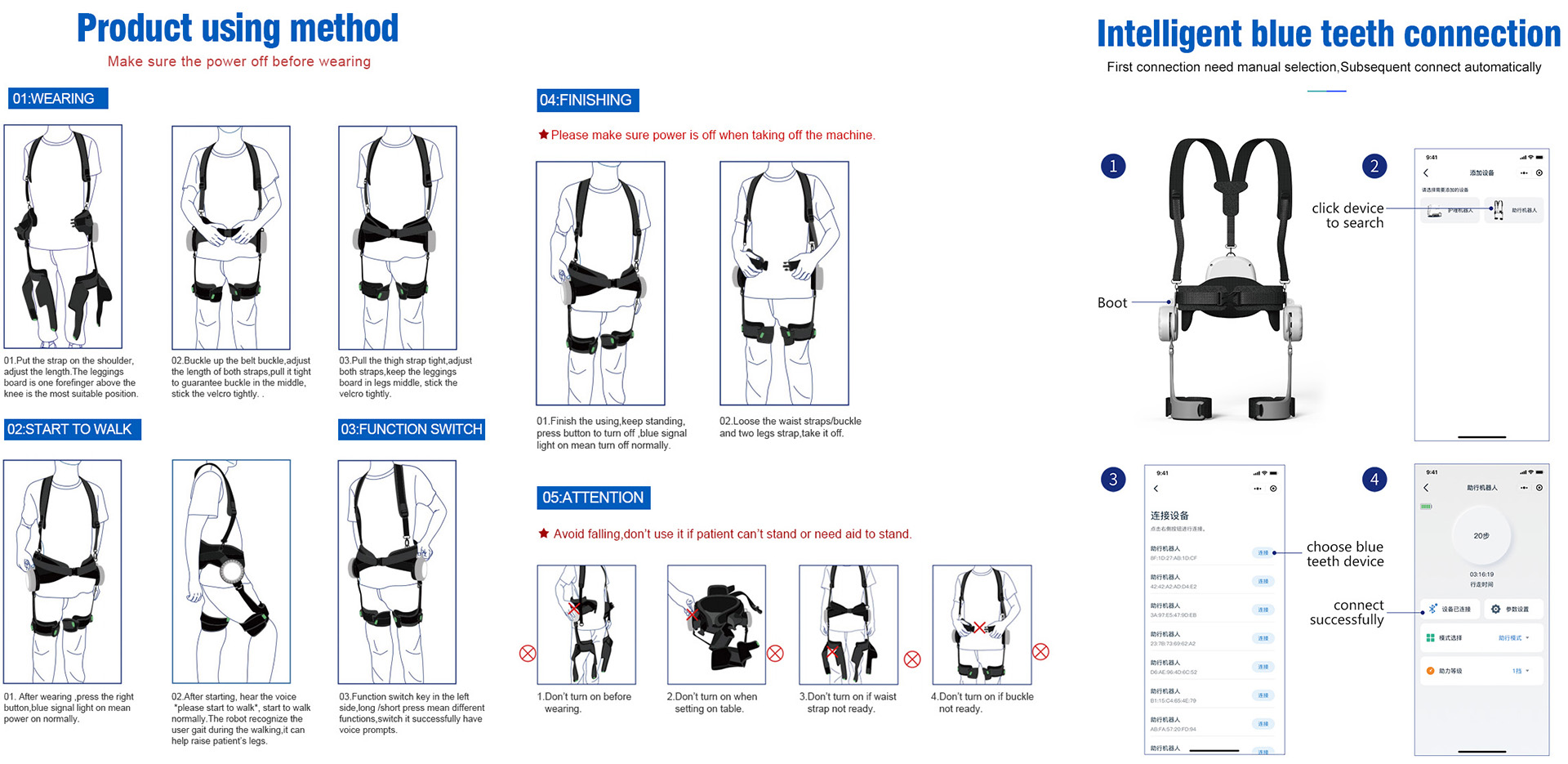
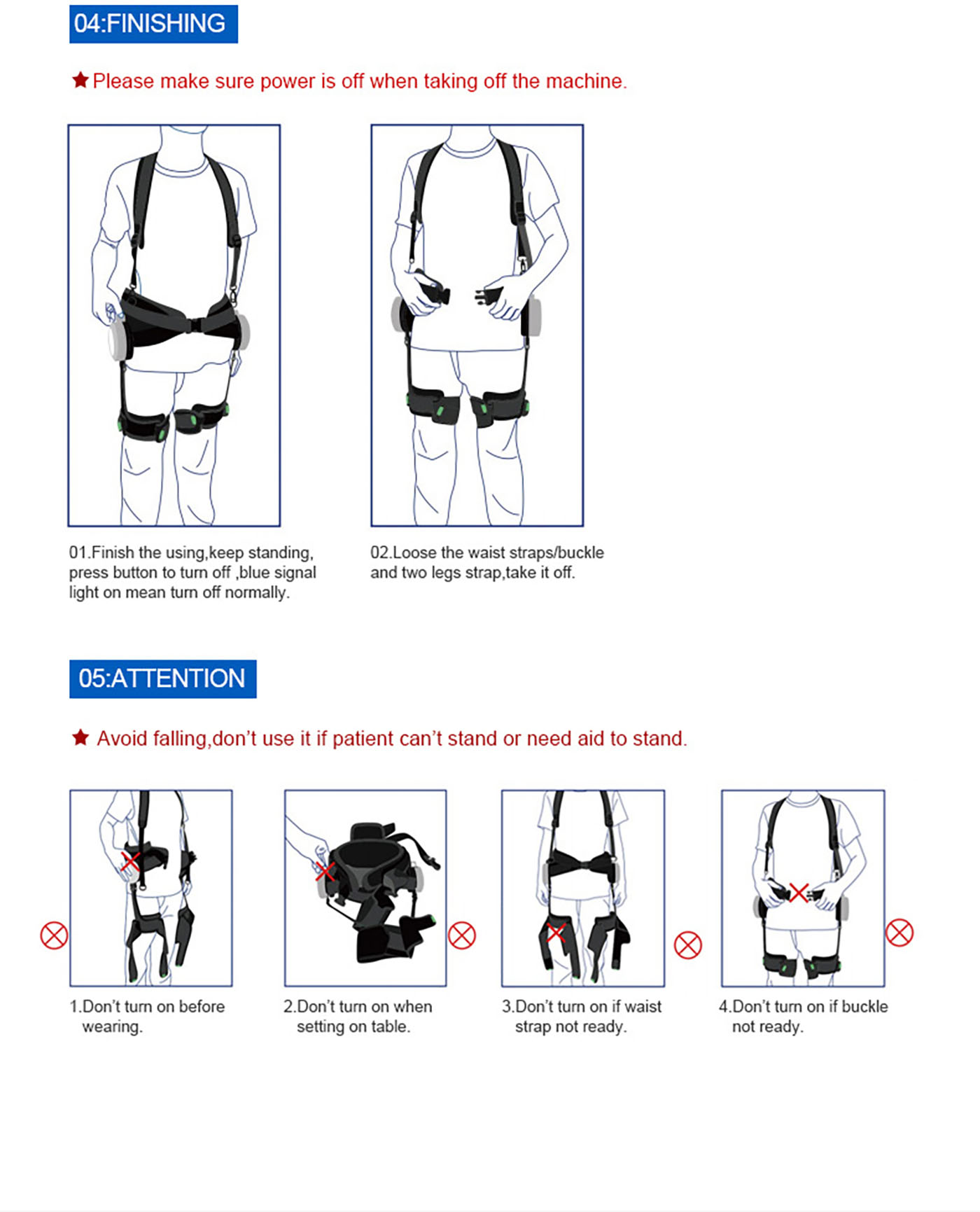
4. Machinam exstingue antequam eam removeas.
5. Si diu non adhibitum est, antequam utaris, quaeso confirma functionem cuiusque partis normalem esse.
6. Usum hominum qui stare, ambulare et aequilibrium suum per se regere non possunt prohibendum est.
7. Hominibus morbo cordis, hypertensione, morbo mentis, graviditate affectis, iis qui infirmitate corporis laborant, uti vetitum est.
8. Homines cum difficultatibus corporis, mentis, vel sensuum (liberis inclusis) a tutore comitari debent.
9. Quaeso, instructiones ad hoc instrumentum utendum stricte sequere.
10. Usuarius primo usu a custode comitari debet.
11. Noli robotum prope liberos ponere.
12. Ne aliis batteriebus aut caricatoribus utaris.
13. Noli instrumentum per te ipsum disiungere, reficere aut iterum instituere.
14. Quaeso, pilam inutilem in organizationem redivivorum pone, ne eam abicias aut libere ponas.
15. Involucrum ne aperias.
17. Si globulus potentiae fractus est, quaeso desine eo uti et ministerium clientium pete.
19. Fac ut instrumentum, dum vehitur, energia electrica exstinguatur et involucrum originale commendatur.










-

Epistula electronica
-

Telephonum
-

Whatsapp
-

Summum
